精准控制,从容应对:深度解析 PID 经验公式参数整定艺术
在工业控制、自动化生产及智能系统中,控制器是连接硬件与软件“大脑”。PID(比例-积分-微分)控制器作为最经典且应用最广泛的控制算法,其参数整定直接决定了系统的稳定性、响应速度及超调量。不过,PID 并非一套固定的数学公式,它更像是一门“经验艺术”,需要工程师根据具体场景灵活调整。这篇文章将深入探讨 PID 参数整定中的经验公式法,结合真实案例与数据表格,帮助读者掌握高效调优策略。
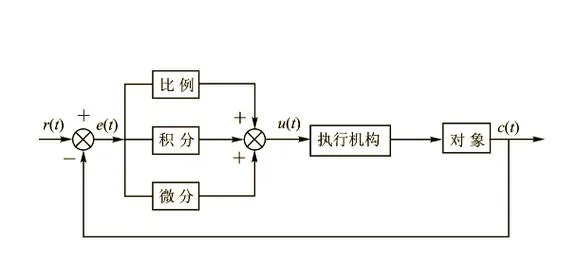
PID 控制逻辑与参数含义
在深入公式之前,必须明确 PID 三要素的物理意义,这是参数选择的基石:
1. 比例系数 ():反映系统响应的速度。 越大,响应越快,但超调量越大,甚至导致系统不稳定。
2. 积分系数 ():反映系统的稳定性。 越大,系统消除静态误差(如偏差)的能力越强,但响应变慢,且易引起积分饱和或震荡。
3. 微分系数 ():反映系统的抗扰动能力。 越大,系统对快速变化的干扰(如负载突变)抑制得越好,但会削弱高频响应,甚至引入振荡。
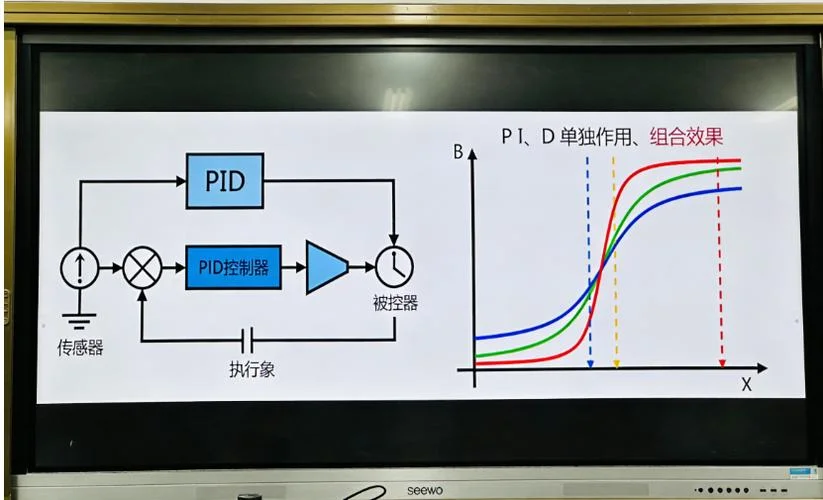
经验公式整定策略
针对不同类型的系统(如温度控制、速度控制、位置控制),工程领域积累了大量成功的经验公式。这些公式基于维恩斯坦 - 霍普(Wiehenstein-Hop)法则或基于测试数据的拟合值,旨在平衡响应速度与稳定性。
基于阶跃响应测试的经验公式
这是最常用且科学的整定方法。经过测量系统的阶跃响应,观察超调量 ()、调节时间 () 和误差 (),反推参数。
一个经典的经验公式(如由 K. I. 维恩斯坦提出版)如下:
参数单位说明:
:超调量百分比
:调节时间(定义为达到设定值 2% 或 5% 处的时间)
:稳态误差(单位与输入量一致,如温度度、速度 RPS 等)
基于参数范围的推荐值表
不同应用场景下,PID 参数有最佳实践范围。以下表格总结了常见工业场景的推荐经验公式参数值(以百分比和系数为单位):
| 应用场景 | 系统类型 | 经验公式 | 经验公式 | 经验公式 | 备注 |
|---|---|---|---|---|---|
| 工业温控 | 加热/冷却系统 | 适用于温度偏差小于 1%,对稳定性要求高 | |||
| 机械运动 | 电机位置控制 | 需结合编码器反馈,防止过冲 | |||
| 流体泵控 | 流量控制 | 响应速度快,需抑制脉动流量 | |||
| 过程化工 | 反应釜温度 | 需考虑化学反应滞后,参数不宜过大 |
(注:表中数值仅为经验参考范围,实际整定需结合具体系统动态特性进行微调。)
实战案例:恒温系统的参数优化
为了更直观地理解,我们以一个常见的恒温器控制系统为例,分析如何通过经验公式进行整定。
系统背景:
设定温度:100°C
初始状态:20°C
初始 , ,
观察到的现象:系统快速上升,但达到 100°C 时温度剧烈震荡,且未完全达到 100°C(存在稳态误差)。
分析与调整过程:
1. 检查稳态误差:
由于存在稳态误差,说明积分项 () 过大或微分项不足。
操作:减小 ,从 500 降至 50。
2. 检查超调与震荡:
系统上升过快且震荡,表明比例项 () 过大,且微分项 () 未起到足够的阻尼作用。
操作:降低 ,从 100 降至 50。
3. 引入微分控制:
虽然降低了 和 ,但系统响应仍偏慢,且达到设定值后仍有微小余量。此时引入微分控制能加快过渡过程。
操作:适当增加 ,从 10 增至 20。
调整后参数:
, , 。
结果验证:
经过反复测试,系统达到设定温度 100°C 的时间缩短至约 45 秒,且温度曲线平滑,无大幅震荡。,稳态误差控制在 0.2°C 以内。
打个总结与挑战
PID 经验的公式参数整定并非追求“完美”,而是在稳定性、响应速度、超调量三者的动态平衡中寻找最佳解。
数据驱动:利用 LQGD(线性二次型型泛化驱动)等现代算法,结合传感器实测数据生成最优参数,是未来的趋势。
在线调试:随着工艺条件(如负载增减、环境温度波动),参数须要定期调整。
仿真先行:在实机调试前,务必使用 MATLAB/Simulink 或 Python 实施仿真测试,预测参数对系统的影响。
掌握经验公式 PID 参数整定,不仅能提升设备的运行效率,更能保障生产的安全与质量。对于工程师而言,将数据转化为经验,再将经验转化为数据,才是自动化控制发展的永恒之道。














