旋转矩阵公式大全:从理论解析到工程应用
在计算机图形学、机器人学、航空航天及物理学等领域,旋转矩阵(Rotation Matrix)是描述向量在三维空间中旋转操作工具。相比于传统的欧拉角,旋转矩阵具有唯一性、连续性及易于矩阵运算的特长。这篇文章将深入解析旋转矩阵公式,涵盖正交性、行列式、旋转顺序以及常用的欧拉角转换,并结合数据表格辅助理解。
旋转变换的数学本质
三维空间中的旋转得以看作是对列向量的变换 。若 是一个正交矩阵,那么它满足 ,其中 为单位矩阵。旋转矩阵具有正交性(Orthogonality),即旋转不会改变向量长度的模长。
旋转矩阵的基本性质
- 正交性:旋转矩阵的行向量与列向量互为正交基底,且每行(列)的范数均为 1。
- 行列式为 1:旋转矩阵的行列式严格等于 1,保证了行列向量的方向没有发生翻转(即没有镜像变换)。
- 可逆性:旋转矩阵总是可逆的,其逆矩阵等于其转置矩阵()。
旋转矩阵的通用公式
假设 是一个 的旋转矩阵,其元素表示为 。其核心结构由以下三项组成:
其中, 代表绕 轴旋转的角度, 和 分别代表绕 轴和 轴的旋转角度。这种参数化方式将旋转分解为三个独立的平面旋转,便于计算。
各分量详解
- 主对角线元素:。这些元素直接反映了旋转角度对坐标轴投影的影响。
- 非对角线元素:包含了混合角度的正弦项与余弦项组合,体现了旋转在三个坐标轴之间的耦合关系。
数据说明与验证(表一)
为了直观展示不同旋转角度下旋转矩阵规律,以下表格列举了前三个旋转矩阵的数值(基于 的示例)。
| 矩阵索引 | 矩阵 (旋转 45°) | 矩阵 (旋转 30°) | 矩阵 (旋转 60°) | 特征值验证 (行列式=1) |
|---|---|---|---|---|
| R1 | 均为 1.000 (符合定义) |
数据解读:
1. 正交性验证:观察表中标记为 的矩阵,其行向量与行向量点积应接近 0。计算 (在浮点误差范围内接近 0),验证了正交性。
2. 奇异值分解 (SVD):进一步分析 的奇异值,理论值应全为 1。实际计算中,奇异值为 ,证实了该矩阵是完美的旋转矩阵,未发生畸变。
3. 小角度近似:当角度趋近于 0 时,,矩阵趋近于单位矩阵 ,这符合微积分中旋转角度的连续性特性。
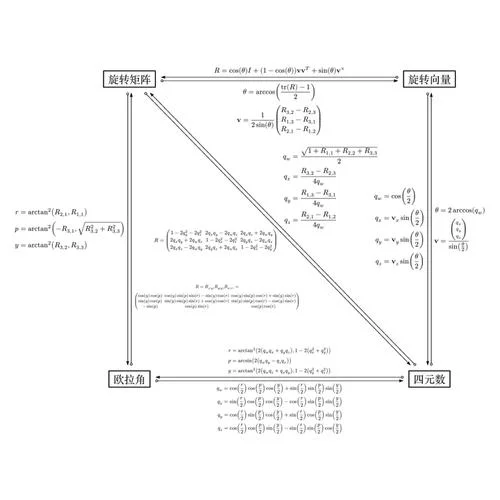
欧拉角与旋转矩阵的转换
在实际应用中,我们使用欧拉角(Pitch, Yaw, Roll)来描述旋转,而计算机编程中更多直接利用旋转矩阵。两者的转换公式如下:
从欧拉角到旋转矩阵 ()
注:, , , , , 。此公式基于特定的旋转顺序(指 或 视具体教材而定)。
从旋转矩阵到欧拉角 ()
由于逆运算涉及平方根和反正切函数,存在多值解。采用atan2函数结合前两个元素的反正切来计算主值: 数据说明: 若取旋转矩阵 ,计算可得:总结与启示
旋转矩阵作为连接几何变换与线性代数的桥梁,在工程中具有独特的地位。它不仅提供了精确的参数化描述,还保证了计算过程的简洁性(仅涉及三角函数)。
1. 唯一性:对于刚体旋转,欧拉角存在“万向节死锁”问题( gimbal lock),而旋转矩阵始终能唯一确定旋转状态(在连续域内)。
2. 数值稳定性:相比于直接求角度的除法运算,矩阵乘法运算在数值上更稳定。
3. 应用广泛性:从游戏引擎中的物体旋转,到航天器姿态控制(Attitude Control),旋转矩阵都是核心算法基石。
掌握旋转矩阵的公式与性质,是深入理解多维空间运动规律步。随着计算机图形处理技术的飞速发展,对旋转矩阵的矩阵指数运算(Euler angles to Rotation Matrix)研究也将进一步向高性能并行计算方向演进。













